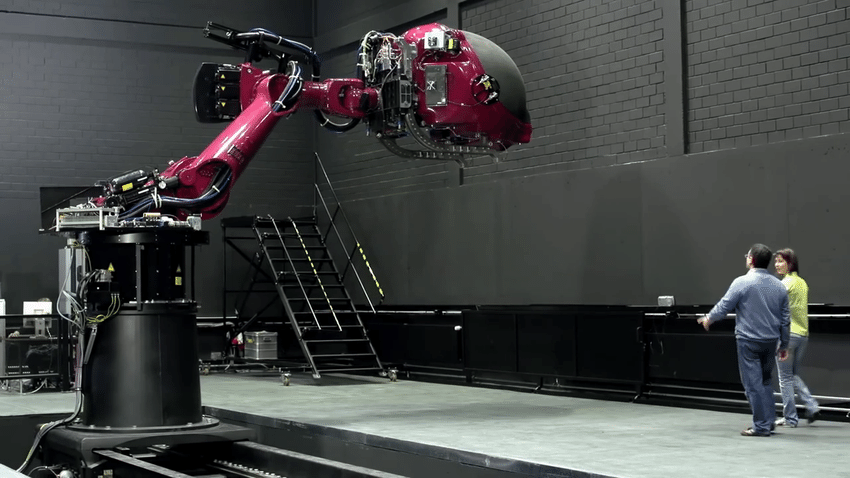
Der MPI CyberMotion Simulator wurde am Max-Planck-Institut für biologische Kybernetik als eine neuartige Alternative zu herkömmlichen Bewegungssimulatoren entwickelt. Für das Max-Planck-Institut für biologische Kybernetik wurde der Roboter für den Einsatz in der Grundlagen- und angewandten Forschung angepasst, indem er mit einem Sitz in einer geschlossenen Kabine mit gebogener Projektionsfläche ausgestattet wurde. Die gesamte Baugruppe ist auf einer linearen Schiene mit einer Reichweite von fast 10 m positioniert. Die acht Freiheitsgrade (Achsen) des Simulators sind nicht gekoppelt, so dass der Bewegungsspielraum im Vergleich zu herkömmlichen Stewart-Plattformen erweitert ist. Daher kann der Simulator verwendet werden, um Teilnehmer in Positionen zu bringen, die mit einer Stewart-Plattform nicht erreicht werden können. Beispielsweise kann die geschlossene Kabine über dem vertikal ausgefahrenen Roboterarm positioniert werden, so dass die Teilnehmer unbegrenzt um die vertikale Achse gedreht werden können und unterschiedliche Gierschwellen bestimmt werden können.
In einer anderen Konfiguration der robotergestützten 6DoF-Bewegungsplattformen können die Probanden in beliebiger Orientierung in der geschlossenen Kabine oder auf dem Sitz positioniert werden, sogar auf dem Kopf stehend, um den Einfluss der Schwerkraft auf die Wahrnehmung zu untersuchen. Die Kabine ist mit einer Stereoprojektion und Befestigungsmöglichkeiten für haptische Force-Feedback-Geräte ausgestattet, die in der Flug- und Fahrsimulation eingesetzt werden. Der MPI CyberMotion Simulator kann so programmiert werden, dass er die Teilnehmer passiv entlang vordefinierter Trajektorien bewegt. Der MPI CyberMotion Simulator kann auch so programmiert werden, dass die Teilnehmer passiv entlang vordefinierter Trajektorien bewegt werden, oder dass sie ihre Bewegungen durch den Einsatz verschiedener Steuergeräte (z.B. Lenkrad und Pedale) aktiv steuern können. In dieser Betriebsart kann der MPI CyberMotion Simulator verwendet werden, um das Verhalten von virtuellen Fahrzeugen wie Autos, Flugzeugen und Hubschraubern zu simulieren.
Dieser Aufbau bietet visuelle, auditive und träge Stimuli und ermöglicht die Messung physiologischer Parameter, wie z.B. Augenbewegungen und funktionelle Hirnbildgebung (mittels Nah-Infrarot-Spektroskopie). Mit diesen Möglichkeiten können mehrere offene Fragen in der menschlichen vestibulären Neurowissenschaft (z. B. Auflösung der Neigungsverschiebung) und optimierte Motion-Cueing-Algorithmen für bessere Simulatordesigns angegangen werden.