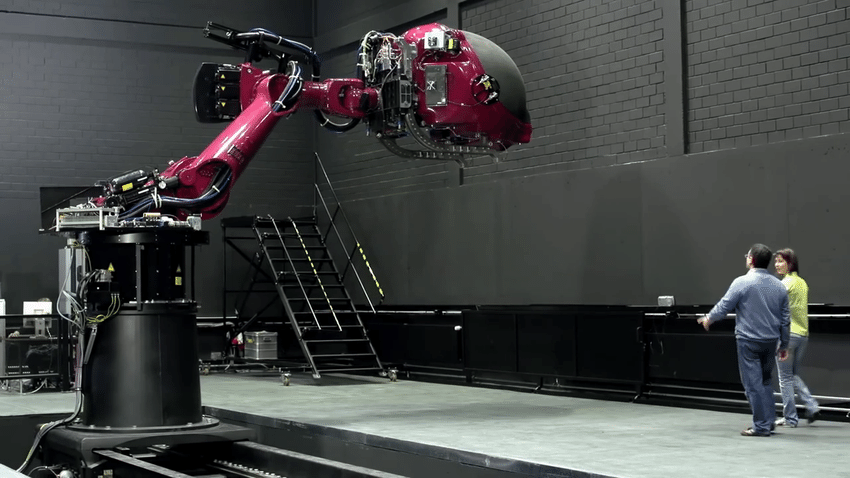
The MPI CyberMotion Simulator was developed at the Max Planck Institute for Biological Cybernetics as a novel alternative to conventional motion simulators. For the Max Planck Institute for Biological Cybernetics, the robot was adapted for use in basic and applied research by equipping it with a seat in an enclosed cabin with a curved projection surface. The entire assembly is positioned on a linear track with a range of nearly 10 m. The simulator's eight degrees of freedom (axes) are not coupled, so the range of motion is extended compared to conventional Stewart platforms. Therefore, the simulator can be used to place participants in positions that cannot be achieved with a Stewart platform. For example, the enclosed cabin can be positioned above the vertically extended robotic arm so that participants can be rotated indefinitely about the vertical axis and different yaw thresholds can be determined.
In another configuration of the robotic 6DoF motion platforms, subjects can be positioned in any orientation in the enclosed cabin or on the seat, even upside down, to study the effect of gravity on perception. The cabin is equipped with stereo projection and mounting options for haptic force feedback devices used in flight and driving simulation. The MPI CyberMotion Simulator can be programmed to passively move participants along predefined trajectories. The MPI CyberMotion Simulator can also be programmed to passively move participants along predefined trajectories, or to actively control their movements through the use of various control devices (e.g., steering wheel and pedals). In this mode, the MPI CyberMotion Simulator can be used to simulate the behavior of virtual vehicles such as cars, airplanes, and helicopters.
This setup provides visual, auditory, and inertial stimuli and allows measurement of physiological parameters such as eye movements and functional brain imaging (using near-infrared spectroscopy). With these capabilities, several open questions in human vestibular neuroscience (e.g., resolution of tilt shift) and optimized motion cueing algorithms can be addressed for better simulator designs.